
ISSN 1666-7948
Revista Electrónica de Ciencia y Educación
Departamento de Química Biológica FCEN-UBA IQUIBICEN
ISSN 1666-7948
Revista Electrónica de Ciencia y Educación
Departamento de Química Biológica FCEN-UBA IQUIBICEN
Asimov entre los seres vivos: ¿Nos ayuda la robótica a convivir con los bioartefactos autónomos?
Luciana Laura Couso1, Pablo Esteban Rodríguez2, Ignacio Enrique Sánchez3
1 Cátedra de Genética - Facultad de Agronomía, Universidad de Buenos Aires
2 Facultad de Ciencias Sociales, Universidad de Buenos Aires, Instituto de Investigaciones Gino Germani - CONICET
Grupo de análisis crítico de la biotecnología
Este artículo es el tercero de la colección "Biología y biotecnología en el Antropoceno"
Resumen
El paradigma dominante de la biotecnología actual es la modificación genética de organismos, dando lugar a bioartefactos autónomos. La robótica también tiene como objetivo el desarrollo de agentes autónomos y desarrolló desde sus inicios conceptos para un diseño estable, como las tres leyes de la robótica de Isaac Asimov. Proponemos que esta experiencia puede contribuir a la formulación de un nuevo paradigma de diseño de bioartefactos. El análisis formal de Haskell para las interacciones entre agentes autónomos, comúnmente usado en biología para estudiar las interacciones entre organismos, puede aplicarse tanto a las interacciones ser humano-robot como a las interacciones ser humano-bioartefacto. La aplicación de este análisis a los robots de Asimov muestra que tanto el diseño de robots como el diseño de bioartefactos autónomos priorizan la prestación de servicios del robot o bioartefacto por sobre su bienestar. Esto es análogo a un parasitismo del ser humano al robot o bioartefacto, lo cual genera inestabilidad en el sistema. Proponemos que es posible diseñar nuestros bioartefactos alejándonos del paradigma de prestación de servicios y caminando hacia una interacción de mutualismo evolutivamente más estable. Discutimos esta propuesta en el contexto de la relación entre seres humanos y biosfera.
Palabras clave: robótica, ciencia-ficción, mutualismo, parasitismo, simbiosis, biotecnología
Asimov among the living: Can robotics help us live together with autonomous bioartefacts?
Abstract
The dominant paradigm in current biotechnology is the genetic modification of organisms, which gives rise to autonomous bioartefacts. Robotics also aims at designing autonomous agents and developed from its beginnings concepts for a stable design, such as Isaac Asimov’s three laws of robotics. We propose that this experience can contribute to the formulation of a new paradigm for the design of autonomous bioartefacts. Haskell’s formal analysis of the interactions between autonomous agents, commonly used in biology to study interactions between organisms, can be applied to both human-robot interactions and human-bioartefact interactions. Application of this analysis to Asimov’s robots shows that the design of both robots and autonomous bioartefacts prioritize the robot or bioartefact giving services over its well being. This is analogous to the human being parasitizing the robot or bioartefact, which generates instability in the system. We propose that bioartefact design can move away from the service paradigm and towards a mutualistic interaction that is evolutionarily more stable. We discuss this proposal in the context of the relationship between human beings and the biosphere.
Keywords: robotics, science-fiction, mutualism, parasitism, symbiosis, biotechnology
Diseño de artefactos autónomos: Robots y organismos modificados
La evolución de los seres vivos y de las máquinas (los robots entre ellas) son fenómenos distintos [1] pero tienen características comunes, entre ellas la de generar progresivamente una mayor capacidad de respuesta al entorno [2, 3] y la imposibilidad de predecirlas matemáticamente [4, 5]. Cuatro años después de la publicación de “El origen de las especies” Samuel Butler propuso que la evolución natural de los seres vivos y la evolución de las máquinas son comparables [6, 7]. Para Butler, la evolución de las máquinas es un caso particular de la evolución de entes autónomos, en el que dichos entes están subordinados a los deseos humanos. La subordinación al uso humano desempeñaría entre las máquinas el mismo rol que ejerce la selección natural en el caso de los seres vivos, pero de una manera acelerada. Esta aceleración sugiere que la relación entre máquinas y seres humanos podría cambiar drásticamente en escalas de tiempo similares a la vida humana y plantea un posible conflicto de interés entre máquinas y humanos. Por un lado, los seres humanos desean estimular la evolución de las máquinas hacia una mayor autonomía (escribe Butler: “No hay nada que nuestra encaprichada raza desearía más que ver una unión fértil entre dos máquinas de vapor”). Por otro lado, sospechamos que dependemos de las máquinas a tal punto que ya no es posible romper nuestra relación con ellas.
La evolución de los organismos vivos modificados, o bioartefactos autónomos, es similar a lo planteado por Butler para la evolución de las máquinas. Tanto la ingeniería genética como la robótica tienen como objetivo el diseño de entes autónomos capaces de realizar tareas en beneficio de sus propietarios. Es decir, no fabrican objetos sino sujetos tecnológicos. Los bioartefactos autónomos están subordinados a los deseos humanos, que ejercen sobre ellos una selección artificial a un ritmo acelerado. La selección artificial suele acotar la autonomía de los seres vivos modificados [8]. Esto plantea un posible conflicto de interés entre humanos y bioartefactos. Por un lado, deseamos que los bioartefactos autónomos nos provean de más servicios, pero por otro tememos que recuperen bruscamente su autonomía y pongan en riesgo nuestro bienestar [9, 10]. En este trabajo hacemos uso de algunos conceptos de la robótica y la ciencia-ficción para buscar una formulación menos inquietante y más estable en el largo plazo de las relaciones humano-bioartefacto.
Las leyes de la robótica de Isaac Asimov
Los robots, máquinas capaces de llevar a cabo tareas complejas de manera autónoma, protagonizaron ficciones desde la antigüedad al menos en las culturas griega, judía y china. Una de las más influyentes es el cuento “Círculo vicioso” de Isaac Asimov [11, 12], en el que se plantearon por primera vez las tres leyes de la robótica (ver Recuadro 1).
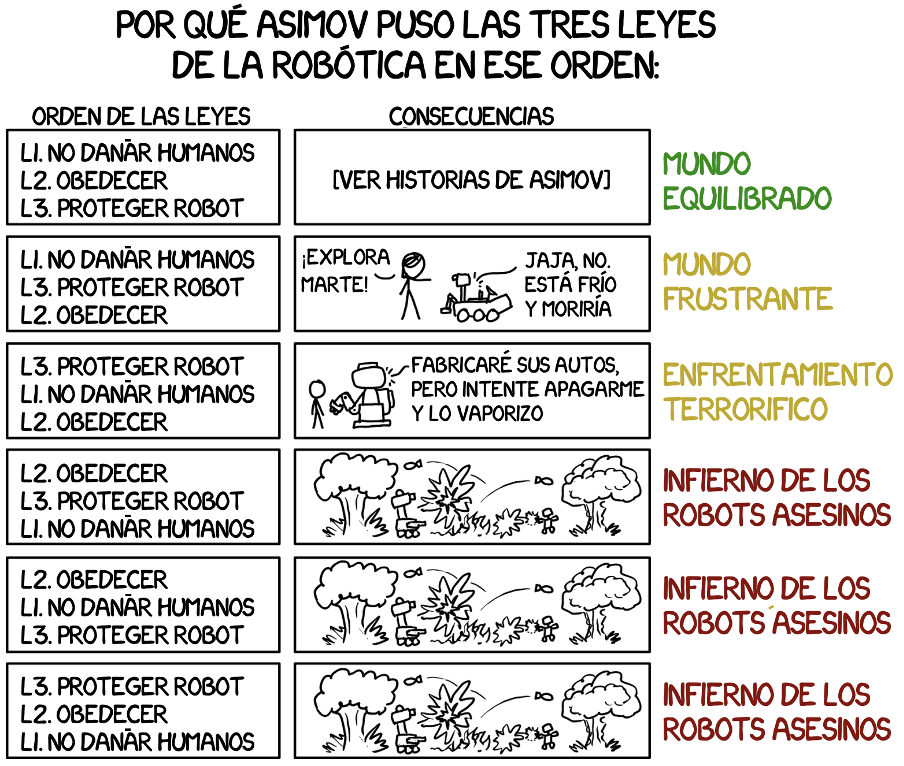
Las tres leyes de la robótica son fórmulas matemáticas impresas en el cerebro positrónico del robot, con una jerarquía clara en la que L1>L2>L3. Están pensadas como una barrera de código que aumenta la seguridad de la interacción humano-robot. La seguridad de los humanos es la prioridad máxima, incluso por sobre la obediencia del robot. Esta jerarquía de las tres leyes resulta, en principio, en un escenario equilibrado (Figura 1). Como se muestra en la figura 1 de manera humorística pero rigurosa, alterar el orden de las leyes llevaría en principio a situaciones frustrantes, inquietantes o directamente peligrosas [13, 14]. Si la autoprotección del robot tiene prioridad por sobre la obediencia [15], los humanos perdemos capacidad de control y podemos frustrarnos. Si además la autoprotección del robot tiene prioridad por sobre no dañar a los humanos, aparecen graves riesgos. Finalmente, si la obediencia del robot es más importante que no dañar a los humanos, todo robot se convierte con facilidad en un asesino. Más adelante nos ocuparemos de las analogías entre estas situaciones, la actualidad de los bioartefactos autónomos y sus posibilidades futuras.
El relato “Círculo vicioso” describe un caso en el que las tres leyes originales de Asimov dan lugar a un comportamiento emergente inesperado [11, 12] (el texto que sigue contiene información central de la trama). Dos científicos son enviados a poner en marcha una mina abandonada en Mercurio. Se hace necesario enviar al robot Speedy a buscar selenio a un pozo. En lugar de cumplir con la tarea, Speedy corre en círculos alrededor del pozo. Los científicos deducen que la orden de recoger el selenio genera una fuerza que atrae a Speedy hacia el pozo (segunda ley), pero que el pozo de selenio contiene algún tipo de peligro para el robot, lo que genera una fuerza que aleja a Speedy del pozo (tercera ley). El resultado es que Speedy da vueltas al pozo, a la distancia exacta en donde se equilibran las dos fuerzas. Los científicos logran rescatar a Speedy apelando a la primera ley: su estrategia es exponerse al intenso sol de Mercurio, que los mataría en unos minutos. Al verlos en peligro, Speedy sale del círculo vicioso y la historia termina felizmente. “Círculo vicioso” muestra cómo la implementación de unas reglas simples en un ente autónomo pueden dar lugar a comportamientos complejos cuando dicho ente se desempeña en un entorno libre y por lo tanto frente a contextos imprevistos.
Si bien las tres leyes de la robótica de Asimov nacieron como una ficción, son un ejemplo paradigmático de los conceptos de diseño de robots autónomos y se siguen discutiendo en la actualidad [16]. Desde el punto de vista conceptual, la discusión actual incluye aplicaciones relevantes a la biotecnología, como el conflicto entre la primera ley y la cirugía automatizada [17] o el diseño de robots moleculares [18]. Desde el punto de vista práctico, se ha mostrado recientemente que las tres leyes de la robótica pueden utilizarse en la programación de robots, mediante la definición de una función de fitness o bienestar basada en teoría de la información llamada “empoderamiento” [19]. El empoderamiento es una medida de libertad basada en la capacidad de control sobre el entorno (ya sea de un ser humano o de un robot). La primera ley de Asimov se convierte entonces en la maximización del empoderamiento de un ser humano posibilitado por la protección de un robot, puesto que un ser humano vivo en pleno uso de sus facultades tiene más empoderamiento que uno muerto o herido. La segunda ley de Asimov es equivalente a la maximización del empoderamiento de un ser humano cuando un robot obedece sus órdenes, ya que se supone que los seres humanos dan órdenes en beneficio propio, que favorecen su propio empoderamiento. La tercera ley de Asimov se corresponde con que la autoprotección del robot prolonga en el tiempo el cumplimiento de las dos primeras leyes y, por consiguiente, el empoderamiento del ser humano asociado a ellas. Por lo tanto, es posible formular una función matemática programable en un robot cuya maximización puede ser en ciertos entornos equivalente al cumplimiento de las tres leyes de la robótica de Asimov. Resumiendo, la propuesta de Asimov está vigente como marco de discusión y puede ser relevante para el diseño de bioartefactos autónomos.
Conceptos básicos para las interacciones entre agentes autónomos
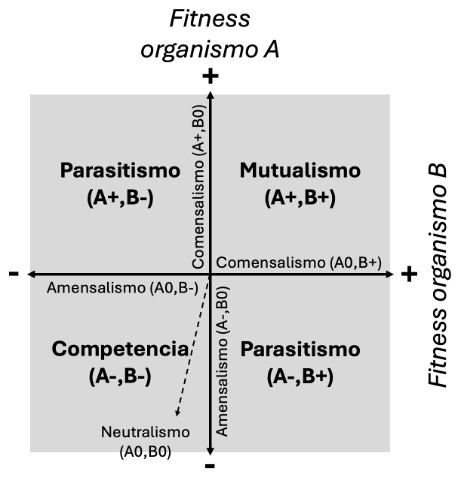
En secciones posteriores vamos a realizar una comparación formal entre las leyes de la robótica de Isaac Asimov y el paradigma actual para el diseño de bioartefactos autónomos. Para facilitar este análisis, vamos a hacer uso de representaciones gráficas de las interacciones entre individuos desarrolladas para las ciencias sociales y más tarde adaptadas a la biología [20, 21]. Dados dos agentes autónomos A y B que interactúan (podemos pensar en un primer momento en dos seres humanos o dos seres vivos no humanos), podemos definir un plano que tiene en cuenta si su fitness o bienestar aumenta, se mantiene estático o disminuye como resultado de la interacción (Figura 2). Podemos representar el bienestar del agente A en el eje Y y el bienestar del agente B en el eje X. Cuanto más nos alejamos del origen, más fuerte es el efecto de la interacción en el fitness de los agentes autónomos. Si la interacción no cambia el fitness de ninguno de los dos agentes, nos encontramos en el origen de la gráfica y la interacción se conoce como “neutralismo”. En el cuadrante superior derecho de la gráfica, el fitness de ambos agentes aumenta como resultado de la interacción. Esta interacción recibe el nombre de “mutualismo”. En el cuadrante inferior izquierdo de la gráfica, el fitness de ambos agentes disminuye como resultado de una interacción de “competencia”. En los otros dos cuadrantes la interacción aumenta el fitness de un agente y disminuye el fitness del otro, una situación que conocemos como “parasitismo”. Los semiejes en los que el fitness de un agente no cambia y el fitness del otro agente aumenta se denominan “comensalismo”, mientras que los semiejes en los que el fitness de un agente no cambia y el fitness del otro agente disminuye se denominan “amensalismo”. Dado que A y B son agentes en principio equivalentes, la gráfica es simétrica, con dos cuadrantes de parasitismo, dos semiejes de comensalismo y dos semiejes de amensalismo.
Representación gráfica de las leyes de la robótica de Isaac Asimov
Usaremos ahora los conceptos de la Figura 2 para representar de manera gráfica las interacciones entre seres humanos y robots en relación a las tres leyes de la robótica (Figura 3). En este caso, representamos en el eje X el fitness o bienestar del robot y en el eje Y, el fitness o bienestar del ser humano. Si la interacción entre el robot y el ser humano cumple la primera ley de la robótica, la integridad del ser humano no está en peligro y nos encontramos en valores positivos del fitness humano, y viceversa. Por lo tanto, la primera ley de la robótica define una región permitida y una región prohibida en las mitades superior e inferior de la gráfica (Figura 3, izquierda). En el caso de la segunda ley de la robótica (robot obedece a humano), podríamos razonar que la obediencia del robot aumenta el bienestar del ser humano. Por ello, el cumplimiento de la segunda ley correspondería a valores positivos de la variable Y, y las regiones permitida y prohibida de la gráfica son las mismas que para la primera ley (Figura 3, izquierda). Si la interacción entre el robot y el ser humano cumple la tercera ley de la robótica, la integridad del robot no está en peligro y nos encontramos en valores positivos del fitness del robot. Como consecuencia, la tercera ley de la robótica define una región permitida y una región prohibida en las mitades derecha e izquierda de la gráfica (Figura 3, centro).
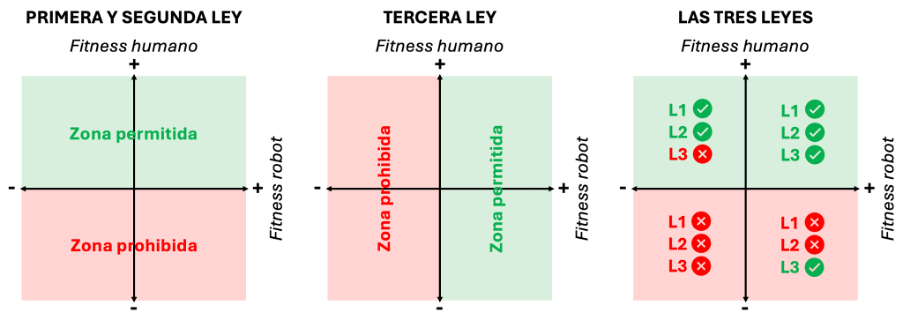
Podemos combinar las consideraciones anteriores teniendo en cuenta que la primera y segunda leyes tienen mayor jerarquía que la tercera ley (Figura 3, derecha). El resultado de unas leyes que tratan de forma distinta al ser humano y al robot es una gráfica asimétrica. Las dos zonas permitidas en la mitad superior de la gráfica son distintas: en el cuadrante superior derecho se cumplen las tres leyes de la robótica, mientras que en el cuadrante superior izquierdo se cumplen solamente las dos primeras leyes. En la mitad inferior de la gráfica encontramos dos zonas prohibidas de distinta naturaleza: en el cuadrante inferior izquierdo no se cumple ninguna ley de la robótica, mientras que en el cuadrante inferior derecho se cumple solamente la tercera ley.
Resultados de las interacciones entre seres humanos y robots
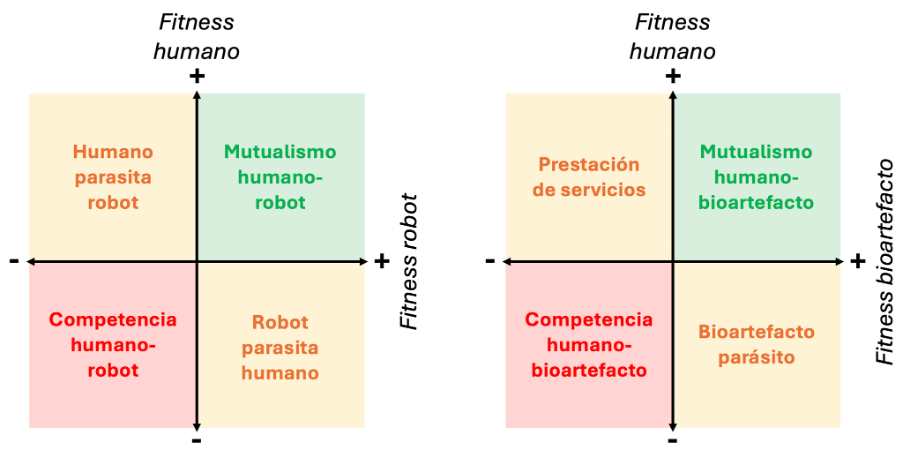
Podemos comparar la representación gráfica de las interacciones entre agentes autónomos equivalentes (Figura 2) con la representación gráfica de las interacciones entre seres humanos y robots de Asimov (Figura 3, derecha). Plasmamos la comparación en el panel izquierdo de la Figura 4. El cuadrante en el que se cumplen las tres leyes de la robótica sería el resultado óptimo de la interacción ser humano-robot y se corresponde con una interacción de mutualismo. En el otro extremo, el cuadrante en el que no se cumple ninguna ley de la robótica sería el resultado menos deseable de la interacción ser humano-robot y se corresponde con una interacción de competencia. Una interacción ser humano-robot en la que se cumplen las dos primeras leyes pero no la tercera se corresponde a un parasitismo del ser humano al robot, mientras que una interacción ser humano-robot en la que se cumple la tercera ley, pero no las dos primeras leyes se corresponde con un parasitismo del robot al ser humano. Observamos entonces una correspondencia general entre las situaciones de parasitismo y el cumplimiento incompleto de las leyes de la robótica. Las tres leyes de Asimov toleran la situación en la que el ser humano parasita al robot, pero prohíben la situación en la que el robot parasita al ser humano.
Resultados de las interacciones entre seres humanos y bioartefactos autónomos
Vamos ahora a considerar cómo el análisis de los robots de Asimov puede aplicarse al diseño de bioartefactos autónomos. En primer lugar, planteamos que las interacciones entre humanos y bioartefactos pueden definirse en el mismo plano de fitness que las interacciones entre agentes autónomos en general (Figura 2) y las interacciones entre humanos y robots en particular (Figura 4, izquierda). En el caso de las interacciones humano-bioartefacto, representamos en el eje X el fitness o bienestar del bioartefacto y en el eje Y, el fitness o bienestar del ser humano (Figura 4, derecha). En el cuadrante superior derecho del plano, el fitness de humano y bioartefacto aumenta como resultado de la interacción (mutualismo humano-bioartefacto). Esto sería análogo al cumplimiento de las tres leyes en una interacción ser humano-robot (Figura 4, izquierda). En el cuadrante inferior izquierdo, el fitness tanto de humano como de bioartefacto disminuye como resultado de la interacción (competencia humano-bioartefacto). Esto se corresponde con el incumplimiento de las tres leyes en una interacción ser humano-robot (Figura 4, izquierda). En el cuadrante superior izquierdo del plano, el fitness del humano aumenta como resultado de la interacción, pero el fitness del bioartefacto disminuye. Podemos describir esta situación como una prestación de servicios del bioartefacto al ser humano, análoga al escenario en que cumplir las dos primeras leyes de la robótica disminuye el fitness de un robot (Figura 4, izquierda). Finalmente, en el cuadrante inferior derecho el fitness del bioartefacto aumenta como resultado de la interacción, pero el fitness del ser humano disminuye. Esta situación podría entenderse como el parasitismo de un bioartefacto a un ser humano, análogo a un escenario en el que no se cumplen la primera o la segunda ley de la robótica (Figura 4, izquierda).
Las zonas deseables para la interacción humano-bioartefacto son las mismas que para la interacción humano-robot. Los cuadrantes superiores de la Figura 4 se entienden comúnmente como situaciones deseables, dado que consideramos que nuestro bienestar es prioritario por sobre el bienestar de individuos de otras especies. Esto sugiere que nuestro diseño de las interacciones entre seres humanos y bioartefactos incluye de manera implícita un principio análogo a la jerarquía de las tres leyes de Asimov (L1>L2>L3). Ambos cuadrantes inferiores se entienden como indeseables y corresponden a bioartefactos autónomos cuyo desempeño tiene resultados negativos en el fitness humano. La bajada en el fitness del ser humano puede deberse a la no prestación del servicio para el que el bioartefacto fue diseñado o a que el bioartefacto dañe directamente al ser humano. Estos escenarios de riesgo para bioartefactos autónomos quebrantan la segunda y primera ley de Asimov, respectivamente.
En resumen, el sentido común actual acerca del diseño de bioartefactos autónomos incluye de manera implícita las tres leyes de la robótica de Isaac Asimov y su jerarquía. En los bioartefactos, las consideraciones de bioseguridad juegan el papel de la primera ley, el diseño para la prestación de servicios equivale a la segunda ley y la autopreservación del bioartefacto (tercera ley) simplemente se da por supuesta por tratarse de un ser vivo.
¿Nos sugiere la robótica otra manera de diseñar bioartefactos autónomos?
Una buena parte de las fantasías tecnológicas actuales anhela la maximización de la actividad económica, por encima de la sostenibilidad de nuestra especie en el largo plazo [22]. En este contexto, imaginamos bioartefactos que maximizan la prestación de servicios (Figura 4, arriba a la izquierda) y que por lo tanto son pura mercancía. El diseño comienza por imaginar aquello que queremos que el bioartefacto haga por nosotros y continúa con la exclusión de todos aquellos rasgos que no nos resultan útiles [8, 23]. Podemos encontrar ejemplos de esta imagen en la ficción. Por ejemplo, los Tadeys de la novela homónima [24] son una extraña especie de simios que solo sirven para ser comidos. En la novela “Ascenso y apogeo del imperio argentino” [25], el “serdo” es un animal modificado, un inmenso cubo de carne cubierto de una fina capa transparente como papel celofán y cuya apariencia se oculta al público. En la película “La isla” [26], una compañía genera a pedido clones humanos como respaldo biológico de las personas originales. Los clones carecen de derechos y viven en una granja de la que no pueden salir, a la espera de que se cosechen sus órganos. Encontramos conceptos similares en la biotecnología actual, que nos promete producción de carne sin la intervención de animales [27], a partir de cultivos celulares que habrían perdido incluso algunas propiedades de la vida [3, 8].
El diseño de bioartefactos para la prestación de servicios (Figura 4, arriba a la izquierda) es equivalente a diseñar una interacción humano-robot en la que el bienestar aumenta para el ser humano y disminuye para el robot (Figura 3) o una interacción en la que el ser humano parasita al bioartefacto (Figura 2, arriba a la izquierda). La robótica sugiere que esta situación no es la óptima, ya que solamente se cumplen dos de las tres leyes de la robótica, y que por lo tanto sería más deseable y estable diseñar una interacción en el cuadrante superior derecho, en el que se cumplen las tres leyes de la robótica y el bienestar aumenta tanto para el robot como para el ser humano (Figura 3). Este objetivo de diseño sería equivalente a una relación de mutualismo entre entre bioartefacto y ser humano (Figuras 2 y 4).
En términos de las tres leyes de Asimov, priorizar el mutualismo en las interacciones entre seres humanos y bioartefactos está relacionado con el escenario que pone la preservación del bioartefacto como segunda ley (en lugar de tercera) y la prestación de servicios como tercera ley (en lugar de segunda) (Figura 1, segundo escenario). Este cambio se ha evaluado en estudios preliminares [15] y generaría robots (o bioartefactos) con un nivel de agencia similar al de los seres humanos, al tiempo que evitaría los escenarios peligrosos para los seres humanos [13, 14]. Podríamos entonces proponer leyes para el diseño de bioartefactos (ver Recuadro 2).
Recuadro 2.Leyes para el diseño de bioartefactos autónomos.
La biología actual sugiere fuertemente que (re)diseñar nuestros bioartefactos para que establezcan con nosotros interacciones de mutualismo es viable. Desde un punto de vista general, el mutualismo tiene un rol importante en la evolución de los seres vivos [28]. Desde lo particular, se conoce que muchas relaciones de parasitismo entre seres vivos son inestables y tienden a cambiar hacia relaciones de mutualismo, ya que todo aquello que aumente el fitness del hospedador aumenta las posibilidades de reproducción del parásito, es decir, su fitness [29]. A medida que parásito y huésped responden a la presencia del otro a lo largo del tiempo, las relaciones se vuelven cooperativas, en ocasiones al punto de que ninguno de los dos organismos puede existir sin el otro [29]. Un ejemplo paradigmático son las mitocondrias de las células eucariotas, que comenzaron como bacterias parásitas de otras células [30]. El entorno de la célula hospedadora las alimentaba y protegía, por lo que les interesaba mantenerla con vida. Hoy en día, las mitocondrias tienen su propio genoma y se reproducen como bacterias, pero no pueden hacer vida libre. El parasitismo se ha convertido en un mutualismo permanente o simbiosis, en el que ninguna de las entidades podría sobrevivir a una separación.
La historia humana también avala la posibilidad de establecer con nuestros bioartefactos interacciones de mutualismo. Se cree que el perro pudo haber surgido de grupos de lobos que seguían metódicamente a manadas de renos y se alimentaban de los renos más débiles, manteniendo así una manada sana [31]. Algunos grupos humanos se alimentaban de manadas de renos gestionadas por los lobos, estableciendo así una relación de parasitismo. Con el tiempo, los humanos aportaron al bienestar de los lobos gracias a su mayor capacidad de avistar (y eventualmente abatir) renos a larga distancia y a la práctica de compartir el alimento. Compartir las tareas de la caza y el manejo de la manada de renos estableció una relación de mutualismo entre seres humanos y lobos, que eventualmente se convirtió en una relación entre seres humanos y perros domésticos.
A partir de este conocimiento, proponemos que es posible (re)diseñar nuestros bioartefactos para una interacción de mutualismo con los seres humanos, que ganaría en estabilidad evolutiva ya que estaría respetando la agencia biológica del bioartefacto, que de manera análoga a la tercera ley de Asimov incluye su autopreservación. Este (re)diseño de bioartefactos podría abordarse a través de una función de “empoderamiento biológico” que calcule el fitness inclusivo de la pareja biológica constituida por el ser humano y el bioartefacto [19, 32].
¿Nos sugiere la robótica otra manera de habitar nuestro planeta?
Estas ideas acerca del diseño de bioartefactos autónomos pueden extenderse a nuestra manera de practicar la biotecnología en general, que a su vez está relacionada con la manera en que habitamos la Tierra. La existencia de los seres humanos depende de manera crítica de la existencia de una biosfera funcional. Nuestros requerimientos nutricionales son complejos y nos hacen dependientes de plantas y microbios que nos proporcionan aquellas moléculas que no podemos producir. Somos, en un sentido muy real, parásitos de la biosfera [33]. Esto origina un conflicto análogo al de un parásito, ya que está en nuestra naturaleza tomar servicios de la biosfera, pero si nos excedemos estará en peligro nuestra propia existencia. La resolución de este dilema sería entonces tomar conciencia de que toda acción humana que aumente el fitness de la biosfera aumenta nuestro fitness [29]. Podemos plantearnos entonces que nuestra longevidad evolutiva depende de construir en el largo plazo una biotecnología basada en una relación de mutualismo entre la humanidad y el resto de la biosfera [33].
El comité de ética para la biotecnología no humana (un organismo asesor del consejo federal de Suiza) nos sugiere una manera de empezar a pensar esta relación con la biosfera. La constitución suiza plantea proteger a las plantas (individuos, especies y biodiversidad) en función de que cada ser vivo tiene valor en sí mismo (“Würde der Kreatur”). A partir de eso, el comité se preguntó qué propuestas éticas pueden hacer realidad dicha protección [34]. Las opiniones mayoritarias fueron las siguientes. En primer lugar, no somos dueños absolutos de las plantas. Por lo tanto, si bien está justificado usar a las plantas para sostener la especie humana, no se puede dañar arbitrariamente a una planta. La prestación de servicios requiere justificación y la preservación de la diversidad y las interacciones ecológicas. De estos razonamientos podemos extraer unos principios éticos generales para las actividades biotecnológicas humanas (ver Recuadro 3). La supervivencia de la humanidad en el largo plazo podría depender, al menos en parte, de incluir estos principios en nuestra organización social y ser capaces de aplicarlos a situaciones concretas [35].
Recuadro 3. Principios éticos para las actividades biotecnológicas humanas.
Primer principio: La humanidad no debe dañar la biosfera o, por su inacción, dejar que la biosfera sufra daño.
Segundo principio: La humanidad puede modificar seres vivos y tomar servicios de ellos de manera justificada para sostener la especie humana, siempre que esto no entre en conflicto con el primer principio.
Agradecimientos
PER e IES son investigadores CONICET. LCC, PER e IES son investigadores-docentes de la Universidad de Buenos Aires.
Referencias:
1. Roli A, and Kauffman SA. (2020) Emergence of Organisms. Entropy 22: 1163 DOI: 10.3390/e22101163.
2. Lem S. (2013) Summa Technologiae, 1st ed. Ediciones Godot, Móstoles (Madrid).
3. Couso, L.L., Rodriguez, P.E., and Sanchez, I.E. (2024) Sistemas vivos, semivivos y zombis. QuimicaViva 23.
4. Kauffman S. (2011) There are more uses for a screwdriver than you can calculate. NPR Cosm. Cult. .
5. Kauffman S, and Roli A. (2021) The World Is Not a Theorem. Entropy 23: 1467 DOI: 10.3390/e23111467.
6. Butler S. (1863) Darwin among the machines. The Press .
7. Butler S. (2012) Erewhon, o al otro lado de las montañas,. Libros del camino.
8. Couso LL, Rodríguez PE, and Sánchez IE. Bioartefactos vivos, alienados y resucitados. QuimicaViva 24.
9. Schubbert R, Hohlweg U, Renz D, and Doerfler W. (1998) On the fate of orally ingested foreign DNA in mice: chromosomal association and placental transmission to the fetus.Mol. Gen. Genet. MGG 259: 569–576 DOI: 10.1007/s004380050850.
10. Prescott VE, Campbell PM, Moore A, Mattes J, Rothenberg ME, Foster PS, et al. (2005) Transgenic Expression of Bean α-Amylase Inhibitor in Peas Results in Altered Structure and Immunogenicity. J. Agric. Food Chem. 53: 9023–9030 DOI: 10.1021/jf050594v.
11.. Asimov I. (1942) Runaround. Astounding Sci. Fict. .
12. Asimov I. (1950) Yo, robot,. Edhasa, Buenos Aires.
13. Munroe R. The three laws of robotics. xkcd .
14. 1613: The Three Laws of Robotics. Explain Xkcd .
15. Briggs G, Williams T, Jackson RB, and Scheutz M. (2022) Why and How Robots Should Say ‘No.’ Int. J. Soc. Robot. 14: 323–339 DOI: 10.1007/s12369-021-00780-y.
16. Murphy RR. (2023) A retrospective of Isaac Asimov at 102 and his Three Laws. Sci. Robot. 8: eadg3178 DOI: 10.1126/scirobotics.adg3178.
17. Moran M. (2008) Three laws of robotics and surgery. J. Endourol. 22: 1557–1560 DOI: 10.1089/end.2007.0106.
18. Kaminka GA, Spokoini-Stern R, Amir Y, Agmon N, and Bachelet I. (2017) Molecular Robots Obeying Asimov’s Three Laws of Robotics. Artif. Life 23: 343–350 DOI: 10.1162/ARTL_a_00235.
19. Salge C, and Polani D. (2017) Empowerment As Replacement for the Three Laws of Robotics. Front. Robot. AI 4: 25 DOI: 10.3389/frobt.2017.00025.
20. Haskell EF. (1949) A clarification of social science. Main Curr Mod Pol Thought 7: 45–51.
21. Lidicker WZ. (1979) A Clarification of Interactions in Ecological Systems. BioScience 29: 475–477 DOI: 10.2307/1307540.
22. Nieva M. (2024) Ciencia ficción capitalista: cómo los multimillonarios nos salvarán del fin del mundo, Primera edición. Editorial Anagrama, Barcelona.
23. Nieva M. (2024) Tecnología y barbarie: ocho ensayos sobre monos, virus, bacterias, escritura no-humana y ciencia ficción, Primera edición. Editorial Anagrama, Barcelona.
24. Lamborghini O. (2012) Tadeys, (C. Aira, ed). Mondadori, Buenos Aires.
25. Nieva M. (2025) Ficciones gauchopunks,. Caja Negra.
26. (2005) The island,. Dreamworks distribution LLC, Warner Bros Pictures.
27. Chriki S, and Hocquette J-F. (2020) The Myth of Cultured Meat: A Review. Front. Nutr. 7: 7 DOI: 10.3389/fnut.2020.00007.
28. Kropotkin P. (2025) El apoyo mutuo. Un factor de la evolución,. Libros de Anarres.
29. Margulis L, and Sagan D. (2002) Acquiring genomes: a theory of the origins of species, 1st ed. Basic Books, New York, NY.
30. Margulis L, Sagan D, and Eldredge N. (2000) What is life?,. Univ. of California Press, Berkeley, Calif.
31. Schleidt W, and Shalter M. (2003) Co-evolution of humans and canids. An alternative view of dog domestication: Homo Homini Lupus? Evol. Cogn. 9: 57–72.
32. Hamilton WD. (1964) The genetical evolution of social behaviour. I. J. Theor. Biol. 7: 1–16 DOI: 10.1016/0022-5193(64)90038-4.
33. Margulis L, and Sagan D. (1997) Microcosmos: four billion years of evolution from our microbial ancestors,. University of California Press, Berkeley.
34. Federal Ethics Committee on Non-Human Biotechnology (ECNH). (2008) The dignity of living beings with regard to plants,. ECNH.
35. Ellis EC, Malhi Y, Ritchie H, Montana J, Díaz S, Obura D, et al. (2025) An aspirational approach to planetary futures. Nature DOI: 10.1038/s41586-025-09080-1.
ISSN 1666-7948 www.quimicaviva.qb.fcen.uba.ar |
Revista QuímicaViva Volumen 24, Número 2, Agosto de 2025 |
Publicado en:
Vol 24, Nro 2
Agosto de 2025
Identificador: E0295
DOI:10.62167/qv.e0295
Tipo: Perspectivas
Recibido en: 26/06/2025
Aceptado en: 18/07/2025
Contacto: Couso, Luciana Laura